辽科的五月,春去夏来,绿树成荫,伫立在校园东北角的智慧制造实验实训综合楼沐浴在初夏的和煦阳光里熠熠生辉。今年2月中旬,智慧大楼正式“服役”,在两个余月的时间里,为提升我校教育教学水平作出了巨大贡献。

位于智慧大楼A区1—2层的,是新落成的新松机器学院。近年来,学校以转型发展为突破口,抢抓发展机遇、抢占发展先机,积极搭建“校企、校政、校校”合作的产教融合平台,广泛与企业合作,共建产业学院,新松机器人学院应运而生。
新松机器人学院是辽宁科技学院和沈阳新松教育集团有限公司于2017年9月共同成立的一所以机器人本科教育为主的新型教育机构。新松机器人学院秉承“双元制、专业性、拓展性”的教学理念,建设机器人专业及实训平台,校企双方本着“校企联动、行业深度、创无止境”的思想,针对新松机器人学院的实际情况,为服务“中国制造2025”战略,加快培养智能制造领域应用技术人才,提升高等院校主动服务产业转型升级的能力,把新松机器人实习实训培训基地建设成为集“人才培养、科研创新、产业服务”三位一体的创新基地,成为具有一定影响力的一流高级技能型人才培训和机器人驱动控制技术研发基地。

机器人实训中心总面积约4723.67m2,包含应用开发中心、综合应用实训中心、智能制造应用实训中心、机器人半实物仿真实验室、机器人基础应用实训中心、机器人结构综合实训中心、工业机器人技术研究实验室、学生创新工作室等特点鲜明、亮点突出的实验室。拥有自平衡小车、履带小车、机器人教学系统、nao机器人、四旋翼飞行器、安川机器人、四自由度SCARA机器人、智能移动机器人、数控精密测量与控制系统、三坐标测量仪、运动控制卡(器)、水平多关节视觉分拣系统、并联机器人分拣系统、智能制造实训生产线、基础应用实训单元、半实物仿真实训系统、离线编程软件、虚拟教学软件、搬运码垛智能应用实训系统、工业机器人拆装工作站等先进的实验设备,设备累计投资约1236万元。



工业机器人拆装工作站
本实验室有新松机器人整体拆装平台1套,安川工业机器人系统1套。
工业机器人拆装维护工作站,以真实的工业机器人为基础,可以对其本体进行零件级的拆解和安装,让学生充分了解工业机器人本体的组成结构和装配过程,可以对内部的常见故障进行排除,完成简单的维修操作,并对本体精度进行标定和参数复位。
工业机器人拆装维护工作站主要针对学生培养安装操作技术而设计开发,让学生深入学习工业机器人内部构成,理解工业机器人的运动过程、驱动传动方式,掌握部分核心部件的安装及配合要点,具备工业机器人本体装配、故障排查、简易维修及零件更换技能,使故障工业机器人尽快恢复生产,缩短工厂停工时间,节约成本,可以服务于工业机器人本体厂商、维修企业和二手机器人经销商。


基础应用实验室
本实验室有工业机器人基础教学实训系统共8套。
系统由工业机器人、教学模块、安全围栏等组成;可通过机械、电气、编程等方面的实训,让学生掌握工业机器人系统集成控制的基础知识。该系统侧重工业机器人的基础操作与应用。通过对机器人码垛拆垛、绘图等操作,让学生掌握工业机器人最基础的操作;基础教学工作站有一定的拓展性,学生可以自行设计和改造机器人夹手,设计不同的教学实验,用工业机器人实现不同的功能。


智能生产线实验室
本实验室有工业机器人智能制造应用中心共1套。
系统包括立体仓库、AGV小车、工业机器人、机器人自动力控装配系统、物料输送系统、视觉物料分拣系统、激光标示系统、搬运码垛装盒系统、物流管理系统、总控系统等,组成一套完成的智能制造系统,培养学生掌握现代物流流程设计、系统集成与工程安装、搬运机器人运作机理、视觉系统、力控系统等技术。训练机器人集成化生产线各环节设计,重点培养学生智能制造方向实训,掌握机器人技巧、现代物流、智能制造等多领域的融合。


搬运码垛实验室
本实验室有新松工业机器人智能搬运码垛应用实训系统1套。
系统由工业机器人、输送线、教学工件、挡停机构、理料平台、吸盘夹手、工件托盘、安全围栏和搬运码垛控制系统组成,能进行机器人自动上料、码垛、理料、自动定位等功能的实训。另可选离线编程、视觉系统、二次开发接口等扩展应用。


分拣实验室
本实验室包含由Delta并联机器人和SCARA机器人为主所构成的分拣实训系统2套。
主要功能是采用机器人、传输带、视觉系统等来训练学生,能够实现工件的抓取摆放作业。该实验室可满足机器人示教、机器人与工业相机手眼标定、机器人与MES系统通信等内容。



半实物仿真实验室
本实验室有新松公司半实物仿真系统6套,鞍山星启数控科技公司半实物仿真系统1套。
系统采用虚实结合的实训方式,保证学生能亲自在真实的示教编程器上进行编程操作,不断设计、修正虚拟工业机器人的动作及轨迹,系统软件部分是在计算机中利用三维技术构造虚拟的六自由度工业机器人,并对其应用的环境进行实时动态模拟,使学生具备工业机器人编程能力。

机器人离线编程实验室
本实验室有新松公司离线编程SRVWS软件80套。
离线编程软件提供一种区别于示教再现的编程方式,可以在电脑上实现机器人整个工作过程的程序编辑,能够仿真离线生成的机器人程序。离线编程软件及仿真系统具备模拟布局、优化机器人轨迹、模拟机器人速度加速度、生成作业程序等功能,同时支持插件式开发,可动态扩展工艺模块。使用离线编程软件,可以从枯燥的机器人作业示教中解放出来,通过导入三维模型或数据,在软件中生成并优化机器人运动和路径,并检验机器人可达范围,最后生成机器人作业,通过发送或拷贝到机器人控制器中,实现机器人自动作业。通过对机器人离线编程软件的学习,可以大大加强学生对机器人应用的理解,提高学生使用机器人的能力,让机器人完成各种复杂的工作。
本软件支持CAD导入及创建虚拟工作站并离线编程,可利用图形描述对机器人和工作单元进行仿真,可以对碰撞的自动检测。具备模拟布局、优化机器人轨迹、模拟机器人速度加速度、生成作业程序等功能。
虚拟教学实验室
本实验室有虚拟教学软件80套。
虚拟教学软件采用虚拟仿真技术开发,覆盖工业机器人相关专业及岗位群,由虚拟工作站、虚拟设备构成,具有高仿真度、高情景化、高沉浸感、高参与性等特色。工业机器人虚拟教学软件以“作业”为引领,可进行机器人工作站搭建、示教编程、陪产运行、维修保养等全过程模拟仿真操作,是一款可自动跟踪、记录、评价的虚拟仿真软件。


运动控制实验室
运动控制室始建于2014年,设备总投资30万元。主要设备有:DM-GUC-400-TPV型四轴一体化运动控制器5台;DM-X200-DC-ICM开放式一维直线运动控制系统10台;DM-R200-DC-ICM惯量可调转子运动控制系统;TS-2812A型F2812工业控制实验开发系统10台;DM-XY20XY工作台和试验桌等部分组成。
本实验室是学生学习机器人专业底层运动控制的基础实验室。实验室将最为常用的运动控制小型化、模块化,配合基于PC和运动控制器的通用运动控制系统或者运动控制专用系统等,组成完全符合工作过程导向的实训和教学系统平台。通过实验将机器人和自动化主要课程融合到一起,培养学生具有运动控制技术基本设计能力,并激发学生综合创新应用兴趣,使学生具有运动控制领域从业的发展潜能。


学生创新活动中心


机器人竞赛活动中心



机器人操作系统科研室
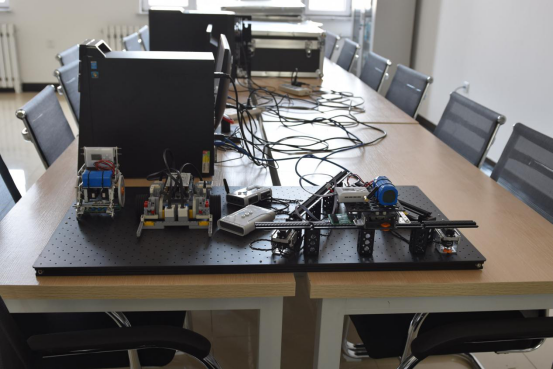
该实验室有NAO机器人(H25)一套,机器人系统创新套件(基于ROS)的Bobac智能移动机器人一套,四旋翼飞行仿真器(GHP3001)一套,履带式智能小车一套(基于ROS系统),固高GUC系列运动控制器8套。
本实验室主要用于智能机器人方向相关的实验、设计、开发和科研工作,提供机器人与无人机系统领域运动控制、算法研究、路径规划以及视觉技术的研究平台。通过本实验室的训练,师生可以对基于ROS操作系统的程序移植、开发有深入了解,可以对机器人与无人机系统运动控制算法的开发与应用有清晰的认识,在智能机器人方向所涉及的主要问题有系统的把握。
新松机器人学院除完成校内相关学科学生的教学、实训任务外,将服务于兄弟院校,服务于社会,服务于企业。学校、社会、企业持续共享机器人实训培训基地的建设成果。同时为学校和社会企业开展机器人人才培训和其他技术服务。建设一支专业配置齐全、实力雄厚的成果推广、技术服务、技术咨询队伍。